
Posts by Collection
portfolio
publications
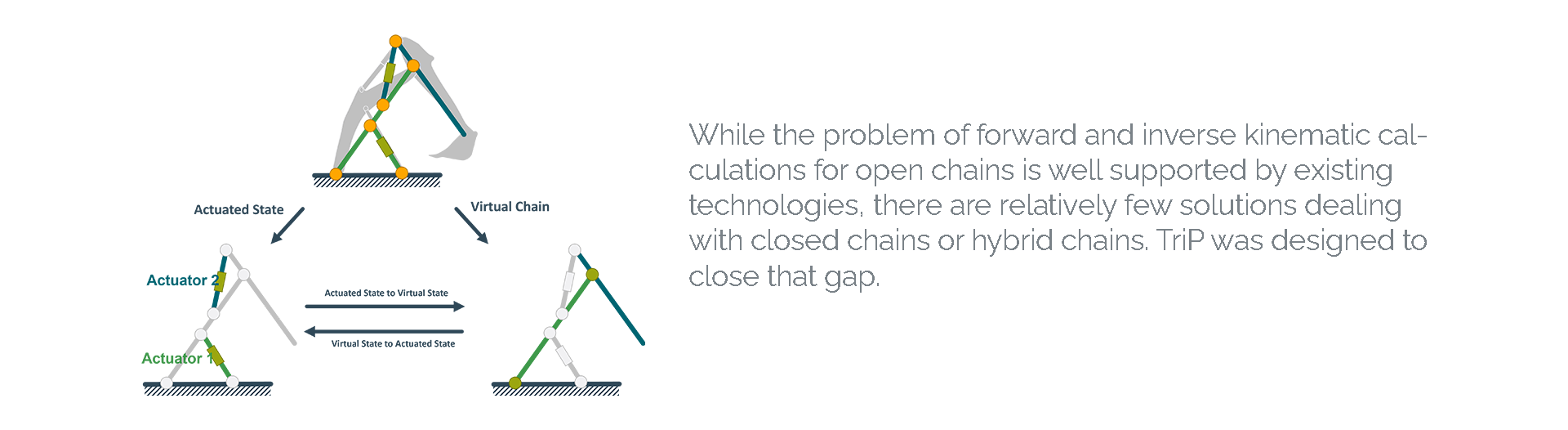
TriP: A Python package for the kinematic modeling of seriell-parallel hybrid robots
Published in Journal of Open Source Software, 2021
TriP is a lightweight and easy-to-use package directly modeling hybrid serial-parallel mechanisms and calculating their kinematics.
Recommended citation: Baumgärtner et al., (2022). TriP: A Python package for the kinematic modeling of serial-parallel hybrid robots. Journal of Open Source Software, 7(71), 3967, https://doi.org/10.21105/joss.03967
Highly dynamic robotic leg for non-biomimetic walking robots
Published in Actuator Conference, 2022
Due to a predisposition of DNA to generate symmetric anatomy, there are no tripedal animals in nature. Yet, threelegged walking might be the sweet spot between the energy efficiency of bipeds and the stability of quadrupeds. This paper presents the non-biomimetic leg for the TriPed, a novel three-legged mobile walking robot that aims to study the advantages and disadvantages of three-legged walking.
Recommended citation: Jan Baumgärtner, Johannes Bach, Lorenzo Masia, Essam Badreddin and Peter Pott (2022). Highly dynamic robotic leg for non-biomimetic walking robots. ACTUATOR22, Mannheim, pp.85-88
talks
Highly dynamic robotic leg for non-biomimetic walking robots
Published:
In this talk I presented the results from my Paper: Highly dynamic robotic leg for non-biomimetic walking robots
Optimal Robot Workpiece Placement for Maximized Repeatability
Published:
In this talk I presented the results from my Paper: Optimal Robot Workpiece Placement for Maximized Repeatability.
Ergonomie für Roboter: Warum Roboter in Fabriken ihre Arbeitsplätze selbst designen sollten
Published:
This talk was given as part of the “Junge Talente - Wissenschaft und Musik” talk series where I talked about why robots get back pains, how ergonomic workstations can prevent this, and why robots should design these themselves.
Increasing Robot Precision by Stroke Division
Published:
In this talk I presented the results from my Paper: Increasing Robot Precision by Stroke Division.
Camera Placement Optimization for a Novel Modular Robot Tracking System
Published:
In this talk I presented the results from my Paper: Camera Placement Optimization for a Novel Modular Robot Tracking System.
Pybullet Industrial: Roboter Simulationen alleine reichen nicht!
Published:
This talk was presented at the ROS developer conference in Germany, where I talked about the need for process simulation in the context of industrial robotics. I also presented pybullet_industrial, the software we have developed to fill this gap in the toolchain.
teaching
Tutor Intelligent Systems
graduate course, Heidelberg University, Chair of Automation, 2018
This course was part of the specialisation “Intelligent Autonomous Systems” and consistet of a lecture as well as a tutorial and weekly exercise sheets which the students had to complete. My Job as tutor included answering the students questions about the lecture as well as designing and correting the exercise sheets. The tutorials where also used as a place to look to the horizon and discuss and design applications of the lecture topics. These included:
Tutor Robotic Games WS 19/20
graduate course, Heidelberg University, Chair of Automation, 2019
The lecture robotic Games is a colaboration between me and Holger Dieterich applying higher level reasoning to mobile robotics systems.
Co-lecturer Robotic Games SS 20
graduate course, Heidelberg University, Aries Lab, 2020
The lecture robotic Games is a colaboration between me and Holger Dieterich applying higher level reasoning to mobile robotics systems.
Lecturer Robotic Games SS 21
graduate course, Heidelberg University, Aries Lab, 2021
The lecture robotic Games is a colaboration between me and Holger Dieterich applying higher level reasoning to mobile robotics systems. The lecture was further improved from its last iteration by focussing more on decision making systems and streamlining the syllabus. Due to covid the lectures where livestreamed and later uploaded to youtube.
Supervisor AI in Production Seminar SS 23
graduate course, KIT, wbk Institute of Production Science, 2023
The course “Artificial Intelligence in Production” is an innovative collaboration between myself and my colleagues at KIT. This new addition to our curriculum aims to address the backbone of AI applications: the use, maintenance and effective utilisation of data.
Lecturer AI in Production WS 23/24
graduate course, KIT, wbk Institute of Production Science, 2023
The course “Artificial Intelligence in Production” is an innovative collaboration between myself and my colleagues at KIT. This new addition to our curriculum aims to address the backbone of AI applications: the use, maintenance and effective utilisation of data.